
Scientific journal
European Journal of Natural History
ISSN 2073-4972
ИФ РИНЦ = 0.204
THE FEATURES OF RANGEFINDER ORIENTATION SYSTEMS APPLICATION FOR MONITORING OF SHIPS AND PLATFORMS SAFE POSITIONING IN THE ARCTIC LATITUDES WATER AREA

The Russian Federation’s strategic plans have determined an increased interest in researching promising areas in the field of Arctic maritime transportation and the development of maritime and coastal infrastructure along the Northern Sea Route in scientific and industrial circles.
The global climatic changes in the direction of warming observed in recent years contribute to the development of the northern regions of Russia and the development of Arctic navigation. Ensuring navigation along the Northern Sea Route, the development of unique Arctic shelf and mainland deposits and mining, the development of the national digital infrastructure of the North with the laying of a high-speed fiber optic cable from Europe to Asia along the NSR as well as ensuring defense and national security in the North are strategic areas development of the Arctic until 2035 [1].
Further improvement of transport infrastructure includes expansion of the icebreaker fleet, reconstruction and construction of port facilities, creation of coastal complexes adapted to Arctic conditions, improvement and construction of modern information and telecommunication infrastructure meeting specific requirements for ship radio communication, introduction of innovative means and methods of information and technological support of maritime safety, including navigation and hydrometeorological informing.
The implementation of strategic tasks related to the development of carbon-containing raw materials on the northern shelf has specific features. Difficult climatic conditions, unfavorable ice conditions, low temperatures and a number of other factors have a negative impact on the safety of navigation and economic efficiency of marine activities which imposes a number of restrictions on the design of ice-class vessels and their technological support.
Priority in the development of the Arctic fields are ships and platforms equipped with dynamic positioning systems which keep ships in a given point by means of thrusters without the use of anchors [2]. The operation in harsh climatic conditions imposes higher requirements for vessel characteristics, technological solutions and vessel equipment in general and imposes restrictions upon dynamic positioning orientation systems.
This work is devoted to the exploration of the prospects and conditions for using the Artemis MK 5 microwave rangefinder positioning system in the Arctic latitudes water area.
Materials and methods of research
Depending on the required accuracy, the following high-precision orientation systems based on different measurement principles are used on ships with a DP system: satellite (GLONASS / GPS), laser (Fanbeam®4), microwave (Artemis), tension cable systems (Taut Wire), radar (RADIUS), hydroacoustic (HPR).
Typical configuration of ship positioning systems includes at least three onboard attitude control systems based on different principles of operation (Figure1).
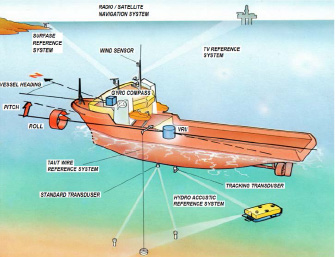
Fig. 1. The typical configuration of the ship’s dynamic positioning system
As a rule it is a satellite system (GLONASS / GPS), hydroacoustic system (HPR) and a taut cable system (Taut Wire inclinometric system). The priority system in the kit is the Taut Wire system. The joint use of three attitude control systems provides increased positioning accuracy and speed, reliability and survivability of the positioning system.
The main disadvantages of such a set of orientation systems when used in the A4 navigation area include the following:
1. Using the GLONASS/GPS satellite system in differential mode is much more expensive than in standard mode.
2. The HPR hydroacoustic system has problems when installing, retrieving and operating transponders in ice conditions.
3. The orientation system on the Taut Wire tension cable is technologically not designed to work in ice conditions. It has a number of intractable problems which include:
- unreliability of the anchor cable during operation and in ice conditions,
- limited depth of use (500 m),
- deflection of the cable when working at depths more than 500 m which considerably reduces holding accuracy,
- impossibility to use the Taut Wire orientation system near the places of underwater technical constructions and communications which can be critical when you need to use it near the places of fiber-optic underwater cable or pipeline installation,
- no possibility of damage diagnostics and repair at the place of use (at sea), it is necessary to perform specialized service or repair works on shore base,
- increased noise and vibration of mechanical parts during operation which negatively affects the technical condition of the mechanical parts of the system and the psychophysical state of the ship’s crew.
Significantly improve the quality of work of the vessel positioning system when working in ice conditions is capable of rangefinder positioning systems Artemis MK5 (start of service and repair since 2014 [3]), and Artemis MK6 [4], which is devoid of disadvantages of orientation system Taut Wire and has no technological limitations when working in northern latitudes. However this system is currently practically not used on Russian ships.
The upgraded Artemis MK5 (MK6) rangefinder positioning system is designed to precisely determine the location of a moving device such as a ship or helicopter with reference to a known fixed point. For operation on drilling platforms the system is designed in a sealed version which guarantees protection against fire even in case of accompanying gas leakage. A typical set of Artemis dynamic positioning system equipment is shown in Figure 2.
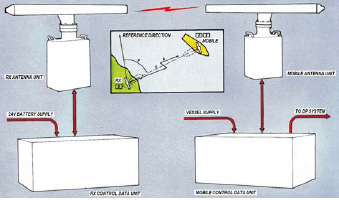
Fig. 2. The Artemis Dynamic Positioning System Configuration
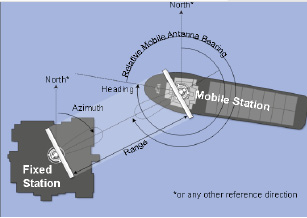
Fig. 3. The operation principle of the Artemis MK5 rangefinder positioning system
The system includes the sets of onboard and ground equipment that interact to determine the position of the vessel. The operation principle of the Artemis MK5 system is shown in Figure 3 [3].
The position of the mobile station relative to the fixed station is determined by an accurate measurement of the distance between the stations azimuth, which is determined by the time of signal propagation from the output of the mobile station to the input of the fixed station and back [5].
The calculated range and bearing can be used to plot the trajectory of the vessel. Basic measurement information is displayed on the Artemis display screen.
The main tactical and technical characteristics of the rangefinder positioning system Artemis MK 5 [3] are summarized in Table 1.
The analysis of tactical and technical characteristics allows us to identify the main advantages of the Artemis MK5. These include ease of use, high positioning accuracy and long range. The system has its own dedicated VHF radio channel which allows you to immediately establish radiotelephone communication in emergency situations.
Table 1
Basic technical characteristics of the Artemis MK5
|
Frequency |
Frequency range: 9,2 – 9,3 GHz |
||
|
Four user selectable fixed frequency pairs |
Pair number |
MOBILE STATION,GHz |
FIXED STATION, GHz |
|
0 1 2 3 |
9,20 9,30 9,23 9,27 |
9,23 9,27 9,20 9,30 |
|
|
Environmental conditions |
Temperature operation range: – 20ºC to +55º C Storage temperature range: – 40ºC to +70º C Weather protection for antenna equipment: IP 66 |
||
|
Distance measurement |
Range: 10 m – 5000 m Display resolution accuracy: 0.1 m Data update rate: 0.25 s Resolution: 0.1m Overall absolute accuracy: standard deviation 1 m |
||
|
Azimuth measurement |
Range: 0O to 360O Overall absolute accuracy: 0.02O standard deviation |
||
The undoubted advantages of the Artemis MK5 system over the Taut Wire system are that it does not depend on the depth of the sea and on the stationarity of the anchor point. This makes it fundamentally possible to use the system not only stationary when placing a fixed station on a fixed platform or on shore but also in mobile application placing it on the flagship. Availability of own dedicated VHF radio channel provides possibility of remote equipment diagnostics and repair works at sea.
Not least important is the absence of noise effects during station operation which positively affects the well-being of the crew.
An operation of the Artemis MK5 system in arctic conditions provides additional benefits that are not achievable with the HPR hydroacoustic system and the Taut Wire cable system. The Artemis MK 5 system has a wide range of operating temperatures, with a lower temperature limit (down to -20° C) that is sufficient to support vessels engaged in production activities along the Northern Sea Route. Working parts of the system are not critical to icing or sea ice. The system provides autonomous heating of moving parts. When using the Artemis MK5, the vessel has no depth limitations and can stay above the communications on the bottom without causing any harmful effects to them.
Results of the research and discussions
The vulnerable spot in the use of the Artemis MK5 system is the operating frequency range. To check the electromagnetic compatibility of the Artemis MK5 radio with other radio navigation equipment of the ship and GMDSS equipment a comparative study of operating frequency ranges was carried out (Table 2).
Table 2
Operating frequency ranges of GMDSS radio equipment and radio station Artemis MK 5
|
The equipment type |
The operating frequencies |
|
ARTEMIS Radio station |
9.2-9.3 GHz |
|
VHF wearable radio station |
156.8 MHz |
|
FURUNO Radar |
9.4 GHz |
|
Emergency beacons: COSPAS-SARSAT; INMARSAT-Е; VHF radio station |
406 MHz, 121.5 MHz, 1.6 GHz, 156. 525 MHz (70th channel) respectively |
|
VHF radio station |
156-174 MHz |
|
MF-HF radio station |
1605-27500 kHz |
|
Satellite communication Inmarsat: Inmarsat-C |
1530-1545 MHz /1626.5-1646.5 MHz |
|
NAVTEX Receiver |
518 kHz |
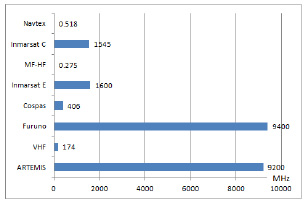
Fig. 4. The operating frequency diagram of GMDSS and ARTEMIS radio equipment
The results of research are displayed on the diagram in Figure 4.
The comparative analysis of the ranges of operating frequencies of ship radio equipment shows that the Artemis MK5 radio has no noticeable impact on most shipboard radio equipment, with the exception of the FURUNO radar. The operating bands of FURUNO and Artemis MK5 are borderline. This can be a problem when both stations are operating at the same time. Since the FURUNO radar has more power than the Artemis radio, the FURUNO radar will drown out the Artemis rangefinder system when they are operating simultaneously, which can cause the attitude control system to deviate from the set holding point. The solution is to employ these stations on alternately during operation.
Conclusion
The Artemis MK5 (MK6) system is an advanced containment system whose tactical and technical characteristics exceed those of traditionally used positioning systems. This type of system has superior capabilities that allow it to be used in arctic latitudes. Due to its advantages the Artemis MK5 (MK6) system can be used as a priority orientation system in a dynamic positioning system to keep a specialized vessel in a fixed point when performing technological operations at high and low depths in extreme ice conditions. The proposed replacement of the Taut Wire orientation system with the Artemis MK5 (MK6) positioning system will allow the vessels to be used in solving strategic tasks of the maritime and land infrastructure development along the Northern Sea Route.
Библиографическая ссылка
Борисова Л.Ф., Холодов Г.Г. THE FEATURES OF RANGEFINDER ORIENTATION SYSTEMS APPLICATION FOR MONITORING OF SHIPS AND PLATFORMS SAFE POSITIONING IN THE ARCTIC LATITUDES WATER AREA // European Journal of Natural History. 2022. № 5. ;URL: https://world-science.ru/en/article/view?id=34291 (дата обращения: 11.06.2026).
DOI: https://doi.org/10.17513/ejnh.34291