
Scientific journal
European Journal of Natural History
ISSN 2073-4972
ИФ РИНЦ = 0.204
SPICE MODEL OF PWM CONTROLLER K1156EU2

Одним из этапов проектирования электронных устройств является их моделирование с привлечением программ схемотехнического анализа. Поэтому создание моделей этих устройств с использованием языка описания электронных схем SPICE представляет, как практический, так и теоретический интерес. Необходимость моделирования устройств отечественного производства подтверждается еще и тем, что для большинства из них SPICE-моделей не существует.
Цель исследования
В данной работе рассматривается SPICE-модель для контроллера широтно-импульсного модулятора (ШИМ-контроллера) К1156ЕУ2, разработанная в программе схемотехнического проектирования MicroCap 12. Часть функциональных узлов макромодели была заимствована из библиотеки компонентов программы MicroCap 12, а часть синтезирована с использованием материалов, изложенных в других работах.
Создание данной SPICE-модели позволит проектировать электронные устройства на основе ШИМ-контроллера К1156ЕУ2 не использования SPICE-модели аналогов или усреднённых SPICE-моделей ШИМ-контроллеров, что исключит неточности проектирования и увеличит точность исследования проектированных устройств.
Благодаря тому, что архитектура ШИМ-контроллера К1156ЕУ2 достаточно традиционна [1, 2], рассматриваемую в работе SPICE-модель можно использовать как основу для разработок ШИМ-контроллеров с похожей архитектурой.
Материалы и методы исследования
Интегральная микросхема (ИМС) К1156ЕУ2 предназначена для управления импульсными источниками вторичного электропитания, использующими частоты до 1МГц. ИМС обеспечивают минимальное время прохождения сигнала через компараторы и внутреннюю логику при максимальной ширине полосы пропускания и скорости нарастания выходного напряжения усилителя сигнала рассогласования. Контроллеры совместимы с системами с прямой связью по входному напряжению и разработаны для работы в ШИМ-режимах по напряжению или току. Функциональная схема микросхемы К1156ЕУ2 приведена на рис. 1 [2].
На функциональной схеме микросхемы К1156ЕУ2 (см. рис. 1) представлены все компоненты и функциональные узлы. К1156ЕУ2 помимо выходного каскада DA9-DA10 включает в себя генератор пилообразного напряжения (осциллятор), источник смещения DA1 на 1.25В, схему блокировки от пониженного напряжения питания DA5, источник опорного напряжения, широкополосный усилитель сигналов рассогласования DA2, ШИМ-компаратор DA6, ШИМ-защёлку DD3, фазорасщепитель DD5-DD6, узел плавного запуска VT1-VT2-DA7, компараторы ограничения тока DA3 и выключения схемы DA4, компаратор контроля величины опорного напряжения DA8, схему управления выходными ключами DD8-DD9 [2].
Описание выводов представлено в таблице [2].
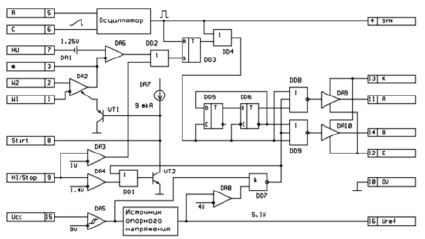
Рис. 1. Функциональная схема К1156ЕУ2
Описание выводов ШИМ-контроллера К1156ЕУ2
|
Номер вывода |
Буквенное обозначение |
Описание вывода |
|
1 |
W1 |
Инвертирующий вход операционного усилителя |
|
2 |
W2 |
Не инвертирующий вход операционного усилителя |
|
3 |
M |
Выход операционного усилителя, инвертирующий вход ШИМ-компаратора |
|
4 |
SYN |
Вход/выход синхронизации |
|
5 |
R |
Вывод подключения времязадающего резистора |
|
6 |
C |
Вывод подключения времязадающего конденсатора |
|
7 |
HU |
Не инвертирующий вход ШИМ-компаратора |
|
8 |
Start |
Вывод плавного запуска |
|
9 |
HI/Stop |
Вывод ограничения тока или останова |
|
10 |
OU |
Общий вывод |
|
11 |
A |
Вывод драйвера A |
|
12 |
E |
Эмиттеры драйверов A и B |
|
13 |
K |
Коллекторы драйверов A и B |
|
14 |
B |
Выход драйверов B |
|
15 |
Ucc |
Вывод питания |
|
16 |
Uref |
Вывод источника опорного напряжения |
Создание SPICE-модели осуществлялось поэтапно. Вначале были выбраны и настроены компоненты из библиотеки программы MicroCap 12: компараторы, усилитель рассогласования, триггеры RS и D-типа, логические элементы. Затем, на основе моделей, описанных в работах [3, 4], были синтезированы осциллятор и выходные драйвера. Далее был создан источник опорного напряжения с защитой от пониженного напряжения питания. В результате макромодель ШИМ-контроллера К1156ЕУ2 приобрела вид, представленный на рис. 2.
Как следует из рисунка, все функциональные узлы модели имеют такие же обозначения, что и в технической документации. В качестве ШИМ-защёлки DD3 используется RS-триггер, а в качестве фазорасщепителя DD5-DD6 – два D-триггера. Компоненты O1, O2, O3 являются компонентами с цифровым выходом (O-компонент). Они используются для создания аналого-цифрового интерфейса [5].
Результаты исследования и их обсуждение
Для установления степени адекватности макромодели ШИМ-контроллера физическому прототипу использовалась схема ее подключения к внешним цепям, приведенная на рис. 3. В данном подключении временно был отключен плавный старт.
В технической документации указано, что при сопротивлении R = 3,65кОм и ёмкости C = 1нф, подключённым к входам осциллятора Rt и Ct, частота осциллятора равна 400кГц +/- 10 %. При этом, на входе осциллятора Ct пороговое напряжение высокого уровня должно быть не менее 2.6В и не более 3В, а пороговое напряжение низкого уровня не менее 0.7В и не более 1.1В. Выходное напряжение усилителя ошибок должно быть не менее 4В, а скорость нарастания выходного напряжения не менее 6В/мкс. Время нарастания и спада сигнала выходных драйверов должно составлять не более 60 нс [2].
Как видно из временной диаграммы рис. 5, частота осциллятора в модели при сопротивлении R = 3,65кОм и ёмкости C = 1нф равна 417кГц, напряжение высокого уровня 2,76В, а низкого 1В. При этом, выходное напряжение усилителя ошибок ровно 4В, и это значение достигается за 0.745 мкс. Время нарастания и спада сигнала выходных драйверов также удовлетворяет требуемому. На диаграмме вывод B был смещен на 1В вверх.
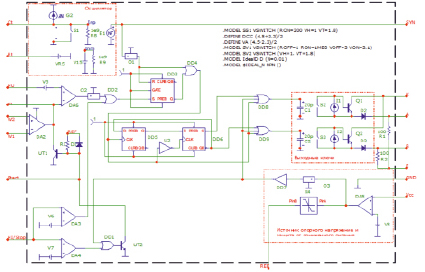
Рис. 2. SPICE-модель ШИМ-контроллера К1156ЕУ2
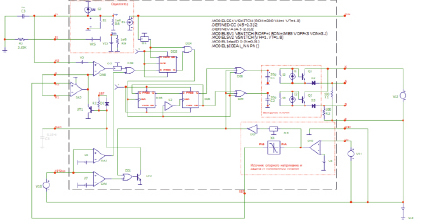
Рис. 3. Схема подключения внешних цепей к макромодели
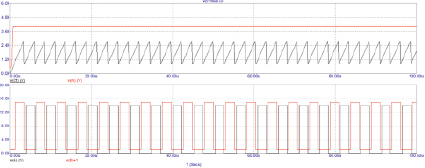
Рис. 4. Временные диаграммы работы макромодели ШИМ-контроллера
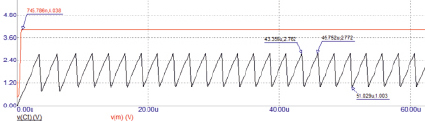
Рис. 5. Временные диаграммы работы осциллятора и усилителя рассогласования ШИМ со значениями главных характеристик
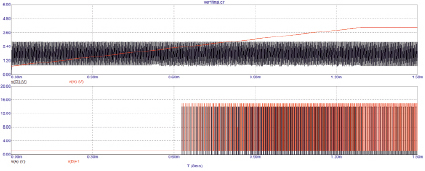
Рис. 6. Временные диаграммы выходных драйверов и напряжения на усилителе рассогласования
Для включения плавного старта, на выводе Start устанавливался конденсатор ёмкостью 0.1мкф. Ограничение напряжения на выводе усилителя рассогласования осуществляется pnp-транзистором UT1, эмиттер которого подключён к выводу усилителя рассогласования, а база к конденсатору плавного старта. По мере заряда внутренним источником тока с номиналом 9 мкА конденсатора плавного старта, возрастает и напряжение на выводе усилителя рассогласования, подаваемого на инверсный вход ШИМ-компаратора. Далее, по мере роста напряжения на выводе усилителя рассогласования, транзистор UT1 закрывается, так как потенциал его базы становится больше потенциала эмиттера, и управление контроллером передаётся усилителю рассогласования [3].
На рис. 6 видно, что благодаря плавному старту напряжение на входе ШИМ-компаратора плавно нарастает, и соответственно длительность импульсов также плавно изменяется. Благодаря плавному старту в ШИМ-контроллере предотвращается перегрузка выходных драйверов.
Заключение
Результаты представленных экспериментов подтвердили адекватность разработанной SPICE-модели ШИМ-контроллера ее физическому прототипу – микросхеме К1156ЕУ2. Данную SPICE-модель можно использовать для синтеза модели микросхемы К1156ЕУ3, заменив триггеры DD5 и DD6 на ИЛИ-НЕ. Помимо этого, данную модель можно использовать как основу для синтеза ШИМ-контроллеров схожей архитектуры.
Библиографическая ссылка
Котковец С.А., Болдырев А.В. SPICE-МОДЕЛЬ ШИМ-КОНТРОЛЛЕРА К1156ЕУ2 // European Journal of Natural History. 2020. № 1. ;URL: https://world-science.ru/en/article/view?id=34045 (дата обращения: 16.07.2026).